Take one or more of each of the following parts, snap or friction fit them together and you get a robot hand!
Snap the first two together to create a rotating joint:
Hold a couple of those together with a connection piece and you get finger:
At one end of the finger place a finger tip:
Give the thumb an additional degree of rotation:
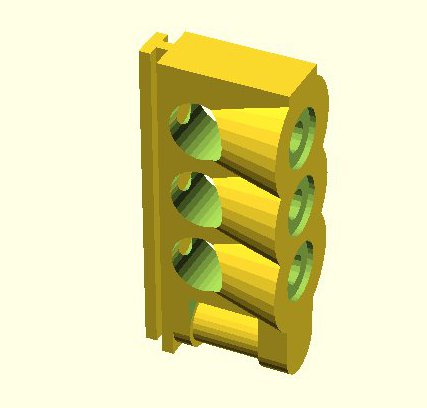
Use a spacer between the fingers...
when you slide them on the wrist, then snap the thumb on and the hand is ready.
Partslists:
| Part 1 |  |
Part 2 |  | Part 3 |  | Part 4 |  |
| Part 5 |  | Part 6 |  | Part 7 | 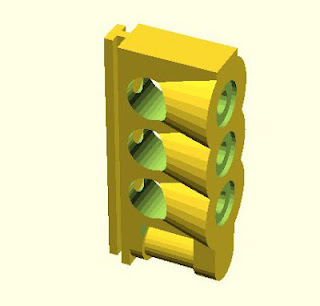 |
Finger:
- Part 1 : 3
- Part 2 : 3
- Part 3 : 3
- Part 4 : 1
Thumb:
- Part 1 : 4
- Part 2 : 4
- Part 3 : 4
- Part 4 : 1
- Part 5 :1
Hand:
- Part 1 : 16
- Part 2 : 16
- Part 3 : 16
- Part 4 : 5
- Part 5 : 3
- Part 6 : 4
- Part 7 : 1